robots industrielssont des équipements importants dans la mise à niveau de la fabrication avancée, et sont également un indicateur important du niveau technologique d'un pays fabrication industrie. L'industrie robotique avec des robots industriels comme corps principal est un moyen important de résoudre les problèmes de l'augmentation des coûts industriels et des contraintes environnementales dans my pays. un robot industriel est un manipulateur ou un multi-degrés de liberté dispositif de machine orienté vers le domaine industriel. il peut effectuer automatiquement le travail et est une machine qui s'appuie sur ses propres capacités de puissance et de contrôle pour réaliser diverses fonctions . il peut être commandé par des humains, et il peut également être exécuté conformément à pré-arrangé programmes. les robots industriels modernes peuvent également effectuer des tâches conformément aux principes et directives établis par la technologie de l'intelligence artificielle.

Le premier robot industriel conforme à la norme ISO standard a été produit par bill griffith taylor en 1937 et publié dans le magazine meccano en mars 1938. Ceci en forme de grue robot industriel est constitué de pièces mécaniques et alimenté par un seul moteur électrique. Ceci robot industriel peut empiler des blocs de bois dans un pré-programmé chemin.

Le milieu du XXe siècle a été une période critique pour la recherche et le développement de robots industriels. surtout dans l'environnement industriel, le travail de mouvements répétitifs et de levage d'objets lourds a fait de la machine une grande aide pour les humains. la plupart des robots industriels sont utilisés dans des environnements de travail trop sales, fatigants ou dangereux pour les humains.
george Devol a proposé pour la première fois le concept de robots industriels et a déposé une demande de brevet en 1954 (brevet approuvé en 1961). en 1956, Davor et joseph Engelberg établi conjointement Unimation basé sur Davor's original brevet. en 1959, Unimation premier robot industriel est né aux états-unis, ouvrant une nouvelle ère de développement de robots.
▲ george Davor
la robotique est une domaine qui combine les domaines de la mécanique, de l'électronique, de l'informatique, du contrôle, de l'intelligence artificielle, de la physique et des mathématiques. Les robots industriels sont composés de six composants de base: unités dynamiques, en bout de bras machines, contrôleurs informatiques numériques, actionneurs, dispositifs d'entrée et détecteurs

robot industriel actionneur: L'actionneur contrôle chaque axe et maintient la direction du mouvement. Depuis le robot a besoin de supporter le poids de divers composants, son mouvement varie considérablement. envoyer des commandes sur la direction du mouvement de l'ordinateur du robot et vérifiez constamment le retour d'information pour vous assurer que les pièces mobiles suivent le bon chemin. Ceci processus nécessite un équipement à grande vitesse pour envoyer des commandes et lire le mouvement du système à une vitesse raisonnable.
ordinateur numérique contrôleur: Pour le robot, il contrôle le fonctionnement normal de chaque composant. Le contrôleur de l'ordinateur peut entrer et stocker divers programmes pour déterminer la connexion et la relation de la séquence de travail.
Capteurs: Le robot utilise des capteurs pour reconnaître et évaluer les changements de position, les différences de style et les obstacles ou dysfonctionnements des systèmes externes.
rétroaction système: Le dispositif de rétroaction du robot industriel peut mesurer la position, la vitesse de déplacement et l'accélération de chaque axe. L'axe doit mettre n'importe quel point à zéro comme point de référence pour obtenir un mouvement relativement linéaire.
dynamique système: la partie de mouvement du système de robot comprenant le robot industriel bras. La structure du système dynamique est réalisée en reliant de nombreuses articulations de rotation ou de mouvement linéaire.
Le mouvement fourni par les articulations du robot industriel peut placer la structure du robot ou le bras du robot dans une position spécifique. Les différents types de configurations de joint sont listés ci-dessous——
▲ abb industriel robot a terminé le "Fanta Tank" défi
articulé configuration: Le bras articulé est le bras de robot le plus courant, très similaire à un bras humain. généralement six axes machines, ils assurer la redondance et déplacer plus facilement.
▲ configuration articulée
il y a six joints rotatifs dans le système de configuration articulé, et chaque joint rotatif est placé sur le joint précédent. Ils ont une variété de configurations pour atteindre un point dans l'enveloppe de travail ou la possibilité de placer des équipements n'importe où.
SCARA configuration: Ceci quatre axes bras effectue principalement des tâches d'assemblage. Ils sont de petite taille, mais ont la plus grande capacité de charge.
▲ SCARA configuration commune configuration
Les quatre axes bras du SCARA La configuration est composée d'une rotation de base, d'un mouvement vertical linéaire et de deux mouvements de rotation Le mouvement vertical linéaire est dans le même plan vertical . Les quatre axes bras du SCARA la configuration est très rigide dans le sens vertical et peut être assurée d'être cohérente avec le plan horizontal.
cartésien configuration: les robots cartésiens sont simples robots à trois axesqui ne contiennent que des entraînements linéaires à trois broches. habituellement utilisé pour le prélèvement et la mise en place, la manutention, la palettisation, le moulage de matières plastiques, l'assemblage et l'entretien des machines.
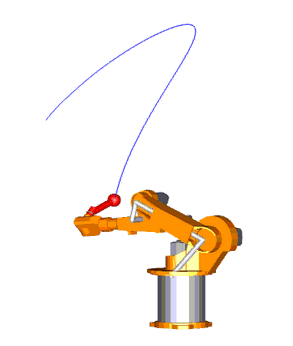
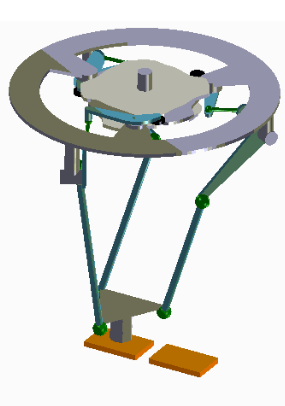
parallèle configuration: l'un des nouveaux développements de conception est la configuration de robot parallèle ou incrémentale, comme le montre la figure ci-dessous——
▲ robot industriel parallèle
un mécanisme parallèle peut être défini comme une boucle fermée mécanisme dans lequel la plate-forme mobile et la plate-forme fixe sont reliées par au moins deux cinématiques indépendantes chaînes, le mécanisme a deux degrés de liberté ou plus et est entraîné en parallèle.
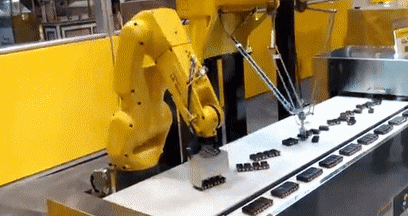
Les applications typiques des robots industriels comprennent le soudage, la peinture, l'assemblage, la collecte et le placement (tels que emballage, palettisation et SMT), l'inspection et les essais de produits, etc. toutes les tâches sont accomplies avec une efficacité, une durabilité, une rapidité et une précision élevées.
afin d'exécuter les tâches de travail avec plus de précision, les robots industriels incluent généralement des sous-systèmes de vision industrielle comme capteurs de vision, connectés à de puissants ordinateurs ou contrôleurs. Pour robots industriels modernes, robots d'intelligence artificiellesont devenus des équipements
 français
français English
English Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt























 IPv6 réseau pris en charge 粤ICP备2021036697号-1
IPv6 réseau pris en charge 粤ICP备2021036697号-1 Un service en ligne
Un service en ligne 4000988557
4000988557 sales1@troysupply.com
sales1@troysupply.com gfreex@hotmail.com
gfreex@hotmail.com Felix
Felix 8936906
8936906 Troysupply_com
Troysupply_com