 français
français English
English Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt


appelez nous maintenant
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.


fonctionnalités
Numéro darticle:
AR4215Paiement:
FOBOrigine du produit:
ChinaCouleur:
whitePort dexpédition:
ShenZhen portsDélai de mise en œuvre:
20 days
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.
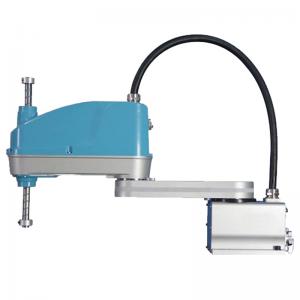
High vitesse et précision SCARA robot
Spécifications:
Programmation: Langage de programmation AR, g code
battre le plus rapide vitesse: 0,38 s
Précision: moins que 0,02 mm
Application: vitesse en ligne à suivre
Caractéristiques:
Application:
convient pour PCBA prise, manutention, tri visuel, assemblage, vissage, chargement, transport, enfichable, soudure et autres industries --- industrie électronique et alimentaire .
performance Benchmark - Paramètre:
nom du modèle | ADT | TOSHIBA | EPSON | YAMAHA | ||
AR4215 | THL400 | LS3-401 | YK400XG-150 | |||
caractéristiques du produit | Haute vitesse, haute précision, haute rentabilité | faible coût, poids léger, énergie | Haute vitesse, haute précision, haute rentabilité | machine rentable | ||
spécification de l'axe | axe x | longueur de bras | 200 mm | 225mm | 225mm | 250 mm |
plage de rotation | ± 127 ° | ± 125 ° | ± 132 ° | ± 140 ° | ||
axe y | longueur de bras | 200 mm | 200 mm | 175mm | 150 mm | |
plage de rotation | ± 142 ° | ± 145 ° | ± 141 ° | ± 144 ° | ||
Axe z | route | 150 mm | 160mm | 150 mm | 150 mm | |
axe r | plage de rotation | ± 360 ° | ± 360 ° | ± 360 ° | ± 360 ° | |
vitesse la plus élevée | axe x | 600 ° / S | 660 ° / S |
|
| |
axe y | 375 ° / S | 660 ° / S |
|
| ||
Synthèse des axes X, y | 5,5 m / s | 6,3 m / s | 6m / s | 6,1 m / s | ||
Axe z | 1,3 m / s | 1,2 m / s | 1,1 m / s | 1,1 m / s | ||
axe r | 1667 ° / s | 1500 ° / s | 2600 ° / s | 1020 ° / s | ||
répétition de la précision de positionnement | Axe X, y | ± 0,01 mm | ± 0,01 mm | ± 0,01 mm | ± 0,01 mm | |
Axe z | ± 0,01 mm | ± 0,015 mm | ± 0,01 mm | ± 0,01 mm | ||
axe r | ± 0,005 ° | ± 0,007 ° | ± 0,01 ° | ± 0,004 ° | ||
temps de cycle standard | 0,45 s | 0,47 | 0,42 s | 0,49 | ||
noté / charge max | 2Kg / 5kg | 2Kg / 5kg | 1Kg / 3kg | 5kg | ||
L'axe r permet un moment d'inertie de charge (évalué / max) | 0,01 kg · m2 | 0,05 kg · m2 | 0,05 kg · m2 | 0,05 kg · m2 | ||
0,04 kg · m2 | 0,005 kg · m2 | |||||
ligne de signal utilisateur | 0,2 m2 × 16 lignes | 8 entrées / 8 sorties | 0,15 m2 × 15 lignes | 0,2 m2 × 10 lignes | ||
6 entrées / 8 sortie | ||||||
utilisateurs trachée | Ф6 × 2 | φ4 × 3 | φ4 × 1 | φ4 × 3 | ||
Ф6 × 2 | ||||||
protection de limite | 1, la limite logicielle | 1, la limite logicielle | 1, la limite logicielle | 1, la limite logicielle | ||
2, la limite mécanique (X, Y, z axe) | 2, la limite mécanique (X, Y, z axe) | 2, la limite mécanique (X, Y, z axe) | 2, la limite mécanique (X, Y, z axe) | |||
poids | 13Kg | 13Kg | 14Kg | 19Kg | ||
déplacement espace:
sélection Faits saillants:
1. portée des travaux: une longueur de bras de robot, plage de fonctionnement
2. Charger: pince design, l'inertie la plus faible possible
3. Précision: répétition de la précision de positionnement
4. Le rythme du travail: temps de cycle d'action, action de temps de consommation de gaz
5.I / o points: points d'entrée et de sortie universels
6. visuel package: exploration statique, exploration dynamique
7. Communication: i / O, réseau, série

ADTECH 4 axes SCARA bras de robot avec des performances élevées et une excellente précision

fabricant de robots industriels en Chine avec des prix bon marché ADTECH FR5215 système 5500mm bras de levage 4 axes scara robot avec avs vision system. ADTECH est professionnel en 4 axes Scara R&D, production et service de robots Pour réduire le coût des produits de plus en plus de robots sont utilisés sur la production line.ADTECH scara Le robot peut remplacer NACHI, TOSHIBA, etc.marque japon, c'est une application pour PCBA montage , vissage chargement, emballage, etc. champ électrique.
OEM Scara Les robots sont conçus pour l'usine avec l'assemblage de composants électriques tels que Samsung, Foxconn, LG et canon etc.

TR600B quatre axes SCARA robot industriel Le robot est un multi-joint quatre axes robot avec propriété indépendante complète droits il adopte un contrôleur haute performance pour contrôler le robot afin d'obtenir un mouvement ponctuel à grande vitesse, un mouvement d'interpolation linéaire spatiale, une interpolation spatiale d'arc et d'autres fonctions. il convient au transport, à diverses occasions industrielles telles que le chargement et le déchargement, le soudage par points, le collage, etc.

traitement des métaux industrie: découpage sur machines à poinçonner, CNC chargement et déchargement, meulage de pièces, ébavurage produits électroniques industrie: assemblage, test et manipulation de copeaux IC, soudage par points, soudure, application de colle, vissage, emboîtement, pièce à usiner polissage pièces automobiles et motocyclettes industrie: manutention, collage, soudage par points LCD / LED et verre industrie: manutention de plaques de verre, assemblage de modules lcm, manutention de plaquettes de silicium et d'écrans laser industrie: soudage par points, coupage appareils électroménagers industrie: assemblage, manutention et vissage d'appareils électroménagers produits;recherche domaines: enseignement des élèves, recherche et développement

TR800B quatre axes SCARA industriel Robot: Le robot est un multi-joint quatre axes robot avec les droits de propriété indépendants complets de LBD. il utilise un contrôleur haute performance pour contrôler le robot afin d'obtenir un mouvement ponctuel à grande vitesse, un mouvement d'interpolation linéaire spatiale, une interpolation spatiale d'arc et d'autres fonctions. il convient à la manutention, au chargement et au déchargement. , soudage par points, collage et autres occasions industrielles

Le SCARA multi-joint manipulateur appartient à la société robots de haute précision, haute vitesse et haute performance. Ceci produit est principalement destiné à l'application de vis de verrouillage de robot dans le 3C industrie. Ceci produit est développé sur la base du SCARA précédemment développé corps de robot avec 600 bras longueurs. un spécial non standard robot pour vis de verrouillage avec positionnement visuel fonction.

Série SOC du robot Yaskawa Scara : La série MOTOMAN-SOC est un robot SCARA spécialement conçu pour les opérations à grande vitesse. Il convient à divers scénarios tels que l'assemblage, le transport, l'emballage, le tri et l'inspection de petites pièces.

robots delta haute vitesse et fiables alimentation. C'est construire avec panasonic servos. prend en charge la caméra de vision sur les lignes de production

Delta 4 axes Robots / Araignée les robots sont adaptés à l'industrie de l'emballage alimentaire.Le système de vision robotique est disponible aussi !

Les robots delta 4 axes sont conçus pour l'emballage alimentaire dans les lignes de production. tels que les fabricants de chocolat, de biscuits et de pain.

araignée delta industrielle Robot: 400 mm-1200 mm diamètre de travail 1-3kg noté charge utile KEBA enseigner pendentif

Robot Araignée Delta Industriel : Diamètre de travail 400mm-1200mm Charge utile nominale de 1 à 3 kg Pendentif d'enseignement KEBA

* Les robots Delta sont rentables, de haute qualité et à faible coût, peuvent être personnalisés par la conception OEM pour les clients et prennent en charge diverses informations de capteur visuel; * Le système d'application du robot TRD est principalement composé de trois parties : robot, dévidoir et cadre d'installation du robot. Le robot se compose d'un substrat, d'un capot moteur, d'un arbre rotatif, d'un bras robot principal ; il est composé d'un bras mécanique auxiliaire et d'un centre de préhension.

Le robot delta est un robot parallèle classique configuration. il a les caractéristiques tridimensionnelles XYZ translation et rotation autour de l'axe z . il présente les avantages d'une vitesse rapide, d'une bonne précision, d'une fiabilité élevée, d'une grande facilité d'utilisation et d'un faible coût de maintenance.il est largement utilisé dans les domaines du tri et du conditionnement à grande vitesse.

* Produit avantages: vitesse rapide, haute précision * Long durée de vie et performances stables * Fort compatibilité et forte flexibilité * Simple contrôle et facilité d'utilisation

*Avantages du robot : vitesse rapide, haute précision *Longue durée de vie et performances stables *Forte compatibilité et forte flexibilité *Contrôle simple et facilité d'utilisation



















s'il vous plaît lisez la suite, restez informé, abonnez-vous, et nous vous invitons à nous dire quoi vous pensez.
 IPv6 réseau pris en charge 粤ICP备2021036697号
IPv6 réseau pris en charge 粤ICP备2021036697号 Un service en ligne
Un service en ligne 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com